Автоматизация Теория автоматизации Системы автоматизации Механизм автоматизации Проектирование автоматизации Использование автоматизация Управление автоматизацией Автоматизация - САПР Автоматизация - практика Автоматизация - софт |

|
Присекин В.Л. - Автоматическое управление механическими системами
Главная задача, поставленная авторами при подготовке пособия - на хорошо знакомых бытовых или специальных технических примерах ввести студентов в мир автоматического управления механическими системами. Поэтому в каждом конкретном случае детально изучаются основные компоненты таких систем, показывается, как формируются определяющие процесс автоматического управления уравнения и выполняется их исследование. Такой подход способствует хорошему усвоению теории и развитию у студентов навыков в решении задач автоматического управления механическими системами.
В пособии не рассматриваются задачи оптимального управления и методы их решения, так как эта область - следующий шаг в проблеме управления сложными системами.
В сообщениях печати, радио, телевидения очень часто употребляются термины: «управление», «внешнее управление» «прямое управление» и тому подобное. Значительно реже можно услышать сочетание - «автоматическое управление». Если при этом речь идёт о космических объектах, то можно догадаться, что излагается материал о маневрах спутника, либо космической станции, совершаемых без вмешательства человека, по заранее заданной программе пилотирования.
Термин «управление» обозначает распределение ресурсов (энергии, информации, финансовых средств) для обеспечения наиболее эффективного функционирования некоторой системы. По существу об этом же утверждается в определении термина «управлять», приведенным В. Далем в «Толковом словаре»: «Управлять - править, давая направление; распоряжаться, ...быть распорядителем. Государь управляет народом, государством; министры управляют, каждый своей частью. Имением этим управляет староста, он из крестьян. Безумным человеком управляют страсти. Управлять лошадьми, судном, рулем давая направление, заставлять идти правым, нужным путем.».
Термин же «автоматическое управление» подразумевает управление некоторым сложным, как правило, техногенным процессом без непосредственного участия человека. Последнее замечание примечательно не только тем, что человек освобождается зачастую от нудной рутинной деятельности по управлению, но и тем, что человек избавляется от непосильной, а иногда и опасной для него работы. Кроме того, многие технические задачи управления требуют для принятия решения весьма больших объемов и скоростей обработки информации, непосильных для человека.
Основная цель курса - исследование самого процесса управления на примере относительно простых механических систем. Поэтому начнем изучение процесса управления с хорошо известных по личному опыту каждого человека задач.
1. ПРОСТЕЙШИЕ СИСТЕМЫ УПРАВЛЕНИЯ.
Рассмотрим процесс установления человеком желаемой температуры смеси горячей и холодной воды в душе. Для этого примем, что следует подобрать соответствующие расходы горячей и холодной воды таким простейшим способом - открывая или закрывая кран с горячей водой при постоянном расходе холодной. Действия человека соответствуют методу проб и ошибок. Если температура смеси больше намечаемой, то, прикрывая кран с горячей водой, он получает пониженную температуру, как правило, меньше желаемой. Тогда приходится приоткрывать кран с горячей водой и т.д.. Здесь наблюдается типичный колебательный процесс установления заданной температуры смеси, процесс, напоминающий колебание массы, соединенной с пружиной (линейный осциллятор). Заметим, что причины возникновения колебаний в линейном осцилляторе обычно излагаются так. Когда тело в состоянии покоя получает импульс (удар), то оно начинает движение с некоторой скоростью, растягивая пружину. Реакция последней стремится вернуть тело в положение равновесия. При максимальном растяжении пружины тело останавливается, но затем под действием растянутой пружины начинает возвращаться к положению равновесия, по достижению которого будет иметь некоторую скорость. Далее этот процесс повторяется. Но где в задаче с душем перемещения, масса и пружина? Роль перемещения играет температура воды, а роль пружины исполняет правило: «если температура воды ниже желаемой, то надо открыть кран, увеличивая расход горячей воды, а если выше - закрыть». Но в отличие от линейного осциллятора, в котором пружина не «задумываясь» возвращает тело в положение равновесия, человек под душем должен сначала «измерить» температуру смеси, затем принять решение согласно установленному правилу (алгоритму), и, наконец, выполнить это решение - то есть закрыть или открыть кран. Так человек управляет расходом горячей воды, добиваясь желаемой температуры смеси.Сложные колебательные процессы наблюдаются во многих бытовых нагревательных приборах, снабженных так называемых «регуляторами». Например, в утюге установленное по шкале значение температуры Т0 поддерживается с помощью теплового реле. Тепловое реле представляет собой биметаллическую пластину, изгиб которой зависит от её температуры Т.
 |
| Схема теплового реле |
На рисунке показаны варианты положения пластины относительно контактов электрической цепи: при Т < Т0 пластина замыкает контакты, а при Т > Т0 -размыкает. Это устройство подключает нагревательный элемент утюга, как только температура становится меньше заданной. Следует так же отметить, что периоды времени между включениями и выключением теплового элемента не постоянны и зависят от многих факторов.
Интересный колебательный процесс возникает в системе управления
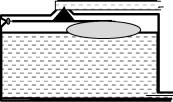
уровнем жидкости в резервуаре, из которого она убывает по произвольному закону.
Схема этого процесса показана на рисунке. В резервуар по верхней трубе через клапан закачивается жидкость при некотором постоянном давлении. Клапан соединен с рычагом поплавка таким образом, что при уров-
Регулятор уровня жидкости не меньше зaДанного, клапан открывается и в
резервуар поступает жидкость. При этом уровень повышается до тех пор, пока клапан под действием подъемной силы поплавка не перекроет подачу жидкости. По мере убывания жидкости её уровень в сосуде уменьшается, клапан открывается снова и происходит повторение процесса поддержания уровня жидкости.
Между колебаниями массы на пружине и рассмотренными процессами имеется еще одно отличие: в первом случае движение массы описывается гармоническими функциями, а в остальных случаях колебательный процесс выражается сложными непериодическими функциями времени.
Несмотря на индивидуальные особенности рассмотренных систем, можно отметить их общие свойства. Так, пружина всегда возвращает тело в положение равновесия и такое же свойство имеет правило регулирования - если значение основного параметра (температура воды, утюга, уровень жидкости) меньше заданной величины, то необходимо увеличить расход горячей воды (подключить к электрической сети нагревательный элемент, открыть клапан). Если имеет место превышение значения заданного параметра, то следует уменьшить расход горячей воды (отключить нагревательный элемент, закрыть клапан). Причем в последних двух случаях процесс регулирования параметров состояния осуществляется без вмешательства человека (автоматическое управление).
2. СТРУКТУРА САУ.
Анализ приведенных примеров показывает, что в отличных друг от друга по назначению системах регулирования (управления) можно выделить некоторые общие свойства.Во-первых, состояние объекта характеризуется одним или несколькими физическими параметрами q (температура воды, утюга, уровень жидкости).
Во-вторых, в этих системах имеются одинаковые по назначению элементы:
а) устройства измерения значений параметров;
б) устройства задания требуемых по условиям эксплуатации значений параметров q11, как некоторых функций времени (программные значения);
в) регуляторы - устройства сравнения текущих значений параметров состояния с программными (вычисляется значение qH-q),
г) преобразователи сигналов регуляторов qH-q ,
д) исполнительные механизмы, обеспечивающие подключение внешних источников энергии для изменения значений параметров q в зависимости от разности qH-q.
Ещё раз отметим, что любая система управления всегда содержит элементы (блоки), выполняющие подобные функции. В целях создания дешевых и надежных устройств регулирования один конструкционный элемент в бытовых приборах может выполнять несколько функций. Например, в утюге тепловое реле является измерительным элементом, регулятором и исполнительным механизмом, подключающим нагревательный элемент к электрической цепи.
Количество примеров систем автоматического управления велико. Мы порой даже не замечаем наличие устройств регулирования в окружающих нас разнообразной аппаратуре и механизмах (от истребителя комаров «Фуми-токс» до компьютерной техники и робототехники).
Исследование процессов, происходящих в таких системах, их анализ и описание на языке математики с возможностью предсказывать и осуществлять на практике развитие процессов в желаемом для человека направлении составляют основу прикладной науки - теории автоматического управления. «Автоматическим управлением» называют процесс изменения во времени без вмешательства человека параметров qb q2,..., qn, определяющих состояние некоторой системы в соответствии с заданными функциями qj = q"(t), j = l,2,...,n.
В таких случаях принято говорить: «управление в соответствии с заданной программой» ( п - верхний индекс ). При таком управлении необходимо так организовать функционирования системы, чтобы в любой момент времени значения qn и q были близки с достаточной точностью для практических целей. Иногда ставится более простая задача сохранение значений параметров состояния на постоянном заданном уровне.
Для иллюстрации изложенного рассмотрим структуру системы автоматического нагружения при испытаниях на прочность планера самолета.

Нагружение конструкции осуществляется перемещением штоков гидравлических цилиндров путем нагнетания масла в нижние полости под большим давлением и слива масла из верхних. Возникающие в штоках силы - реакции деформируемой конструкции планера - измеряются динамометрами. Опыт показал, что «ручное» управление подачей масла в гидравлические цилиндры приводит к большим ошибкам в реализации программных сил. Поэтому были разработаны системы автоматического управления для испытания на прочность летательных аппаратов.
На рисунке приведена схема автоматического нагружения крыла самолета в одной точке. В этой схеме есть все типовые элементы САУ.
Объект исследования - крыло.
Задатчик программных значений сил - выходной сигнал - qn(t).
Динамометр - измеритель фактического значения силы - q(t).
Регулятор с преобразователем - устройство сравнения программных и фактических значений сил (qn - q) c выдачей управляющего сигнала u=k1*(qn -q) на двигатель для перемещения штока золотника.
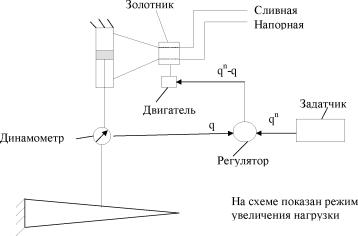
Исполнительный механизм - золотник с гидравлическим цилиндром.
Значения параметров состояния передаются от одного звена САУ к другому по линиям (каналам) связи, условно изображенными отрезками прямых со стрелками. На физическом уровне эти линии представляют собой проводники для передачи электрических сигналов, трубы из высокопрочных материалов для сливной и напорной магистрали, троса и тяги для соединения штока гидравлического цилиндра с крылом и закрепления корпуса цилиндра. В конкретных САУ линии (каналы) связи и их тип выбираются по условиям надежности и минимальной стоимости системы управления. Как правило, в любой САУ присутствуют указанные выше элементы. Однако свойства элементов САУ могу быть весьма разнообразными.
3. ТИПОВЫЕ ЗВЕНЬЯ САУ.
Для более полного усвоения дальнейшего материала приведем перечень типовых элементов, применяемых в разных САУ с указанием их характеристики - в некоторых случаях - физической интерпрета- -
ции. -> qn(t)
Задающее устройство. Этот блок изобразим в виде прямоугольника с выходящей из него линии со стрелкой. Линия изображает канал связи, по которому передается значение qn(t), где t, как правило, время. По линии связи передается электрическое напряжение, либо ток, пропорциональные значению параметра qn(t), либо цифровой код. Таким образом, рассматриваемый блок имеет лишь сигнал выхода.
S=qj+Pj
Pj
Сумматор. Это устройство имеет два и более входа и один выход. Оно предназначено для суммирования сигналов, подаваемых на блок по линиям связи. Частный случай сумматора - регулятор или сравнивающее устройство, в котором производится сравнение двух сигналов. Регулятор часто изображают в виде следующего блока. Выходной сигнал сумматора равен сумме входных сигналов. Таким образом, уравнение состояния этого элемента САУ можно представить в следующем виде:
sj = q + Pj.
Число слагаемых в правой части уравнения определяется числом входных сигналов сумматора.
-> S = k*qj
qj
Усилителъ. Этот блок изменяет величину входного сигнала для согласования с входами других элементов САУ. Усилителем будем называть так же и устройство преобразования сигнала в другой физический вид. Усилитель изображают блоком с одним входом и одним выходом.
Уравнение состояния усилителя является одним из простейших:
s = к • qj
Здесь k является константой, которую называют коэффициентом усиления. Для электрических сигналов к усилителям относятся делители напряжений, трансформаторы переменного тока. Для механических параметров (сила, перемещение) усилителем может быть обыкновенный рычаг.
Дифференцирующее звено. Так называют блок, выходом которого является производная по времени от входного сигнала - х:
dx dt
Физически наглядным примером такого звена является катушка индуктивности, через которую пропускают переменный ток. Тогда напряжение на зажимах катушки вычисляют по формуле:
L * d dt
Здесь L -индуктивность катушки, I - электрический ток.
Интегрирующее звено. Название этого элемента САУ подсказывает, что выходом этого блока является интеграл от входного сигнала по времени:
t
у = | x • dt
о
Примером такого звена может быть электрическая емкость, через которую проходит ток. В этом случае заряд на обкладках конденсатора определяется следующим интегралом:
t
q = j C • I • dt 0
Наглядным примером интегрирующего звена является бак, в который подается жидкость через трубу. Здесь масса жидкости в баке определяется интегралом по времени от известного расхода. Аналогичную характеристику имеет перемещение штока гидроцилиндра, вычисляемое как интеграл от расхода масла, подаваемого из напорной магистрали.
В общем случае свойства звена САУ можно описать, обобщая характеристики простейших блоков следующим образом:
d2 y dy 7 d2 x 7 dx 7
1 dt2 2 dt 1 dt2 2 dt 3
| Уравнение звена | Название |
| y = k x | Усилитель |
| dy/dt = к x | Интегрирующее звено |
| T dy/dt + y = k x | Апериодическое звено |
| T2 d2y/dt2+2TZ dy/dt + y = kx | Колебательное звено |
| y = k (t dx/dt+x) | Дифференцирующее звено 1 пор. |
| Y = k (t2 d2x/dt2+2t dx/dt+x) | Дифференцирующее звено 2 пор. |
Здесь k, T, Z, t, - постоянные, численные значения которых задаются на основе свойств конкретных блоков, входящих в САУ.
В аналоговых системах автоматического управления принята следующая классификация регуляторов. Пусть на вход регулятора подаются сигналы хп и х, тогда для сигнала на выходе y можно записать общее уравнение:
y = k1 (х* - х) + k2 I (х’ - x)dt + k3 —(х* - х) о dt
Ниже приведена таблица основных типов регуляторов в зависимости от значения коэффициентов k1, k2, k3:
| ||||||||||||||||||||
| 4. УРАВНЕНИЕ СОСТОЯНИЯ САУ. |
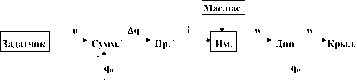
Анализ схемы показывает, что она является изображением на плоскости чертежа элементов, образующих САУ и соединенных каналами связи. На этой схеме изображены следующие элементы реальной САУ.
«Задатчик» - устройство, выходом которого является сигнал u.
«Мас.нас.» -маслонасосная станция, с которой двумя трубами, образующими напорную и сливную магистрали масла, соединяется золотник управления гидравлическим цилиндром.
«Сумм.» - регулятор системы управления, на входы которого поступают сигналы q0 и u, а на выходе формируется их разность u - q0.
«Пр.» -преобразователь сигнала Dq в ток i, управляющий двигателем исполнительного механизма.
«Им.» - исполнительный механизм, состоящий из двигателя, золотника и гидравлического цилиндра (ГЦ). Назначение этого блока - преобразовать ток в перемещение w штока ГЦ для создания реакции крыла q.
«Дин.» -динамометр, расположенный между крылом и ГЦ, предназначен для измерения силы q. Выходным параметром этого звена является значение реализованного в данный момент времени усилия q, определенного с некоторой случайной ошибкой 5.
«Крыл.»- объект испытаний - крыло.
На блок - схеме не указана система начального пуска САУ, которая обеспечивает одновременное включение всех устройств САУ и синхронизацию их работы.
Структурная схема позволяет весьма просто сформировать уравнения состояния САУ. Для этого достаточно дать вывод уравнений связи входных и выходных сигналов каждого звена. В случае правильно составленной структурной схемы будет получена полная система дифференциальных и алгебраических уравнений, которую принято называть уравнениями состояния САУ.
Представление САУ в виде указанной совокупности блоков не обладает свойством единственности. Например, исполнительный механизм можно представить в виде трех блоков: двигатель, золотник, гидравлический цилиндр. Можно указать две линии связи маслонасосной станции с исполнительным механизмом, каждая из которых будет представлять напорную и сливную магистрали соответственно. Однако, если вывести уравнения состояния САУ на основе свойств входящих в нее элементов, то система уравнений будет обладать свойством единственности.
Уравнения состояния САУ получим, если опишем свойства каждого блока.
Задатчик:
это - «программа» нагружения крыла, то есть qII(t) является известной функцией времени.
Регулятор:
Усилитель:
Здесь k1 параметр, подбираемый при настройке системы управления. Исполнительный механизм:
dw
dt
= k2 • i.
(4)
Крыло:
q = C w. (5)
Здесь С - жесткость крыла, определяемая для точки приложения нагрузки. Процесс нагружения считается столь медленным по сравнению с периодом колебаний крыла, что можно пренебречь силами инерции в уравнении (5). Динамометр:
qo = q + 5. (6)
Величина 5 характеризует случайную ошибку измерения силы q. Изучение системы (1) - (6) показывает, что число параметров, характеризующих состояние системы управления равно 6 (u, q, Dq, i, q0, w). Очевидно, что количество неизвестных равно числу уравнений. Решение этой систему для заданных начальных условий определяет состояние САУ в любой момент времени. Систему уравнений можно представить в более простой форме, если исключить ряд параметров:
^ + kik2Cq = kik2C(qп -8) (7)
dt
Исследование решений уравнения (7) позволяет подобрать параметры кь к2 так, чтобы силы, действующие на конструкцию для любого t были близки к программным значениям qH(t).
5. ОСНОВНЫЕ ЗАДАЧИ ТЕОРИИ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ.
Отметим один недостаток алгоритма управления (3), который присущ всем П-регуляторам. Ток, подаваемый на двигатель, пропорционален разности qH(t) - qo(t). Следовательно, чем ближе значения программных и фактических сил, тем менее эффективно управление процессом нагружения. Очевидно, что для устранения указанного недостатка необходимо увеличить коэффициент кі. Однако это вызовет усиление влияния погрешности Aq на процесс управления нагрузками на крыло, и в реальных, более сложных САУ, приведёт к неустойчивой работе системы.Изучение частного примера позволяет сформулировать основные задачи теории автоматического управления: исследование динамических свойств САУ, подбор параметров блоков САУ и разработка таких алгоритмов управления, которые наилучшим образом реализуют заданную программу для параметров состояния САУ во времени.
Рассмотрим, как решаются эти задачи на примере САУ нагружением крыла.
а) Для анализа динамических свойств системы управления исследуем нестационарный процесс при реализации программы нагружения в виде «ступеньки»
qп (t ) = h (t),
где h(t) единичная функция Хевисайда. Дополнительно примем, что ошибки измерения сил малы и ими можно пренебречь. Тогда уравнение (7) преобразуем к виду:
dq + kxk2 Cq = k1k2Cq п (8)
dt
Здесь для t > 0 , в соответствии с принятой программой, положим qH = 1.. Решение дифференциального уравнения состоит из общего решения однородного уравнения и частного решения неоднородного. Разыскивая общее решение в виде q = A • e1-t, получим для определения к :
A(1 + k1k 2C) = 0.
Следовательно, 1 = -k1k2C. Теперь общее решение уравнения (8) представим в виде:
q = A • eht +1.
Постоянную A определим, используя начальное условие: при t=0 q=0. Окончательно имеем решение:
| q = 1 - e ht. |
 |
Отметим, что нагрузка на крыло не сразу достигает программного значения, равного 1.
Интервал времени, для которого отличие в нагрузке достигает 15%, называют периодом времени переходного процесса.
б) Установившееся состояние САУ исследуется при программном нагружении силой, изменяющейся по гармоническому закону: q (t) = cos wt.
В этом случае следует построить частное решение уравнения (8) для указанной программы нагружения. Для сокращения выкладок найдем частное решение следующего уравнения:
dq + k1k2Cq = k1k2Ceiwt, (9)
dt
а затем выделим из него действительную часть.
Решение уравнения (9) запишется в виде:
q = k1k2 C eiwt = Re i (wt+j)
iw + k1k2 C
0 для k1k2 c > 0
k1k 2 C
j = arctg (-
kik2C) I p для k1k2 c < 0
где
(k1k2 C )2 + w 2
Теперь находим, что установившийся режим функционирования САУ при гармоническом нагружении описывается уравнением:
q = R ¦ cos(wt + j).
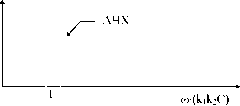
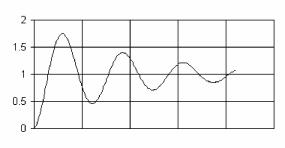
Исследование зависимости силы, действующей на конструкцию, от частоты приводит к заключению: амплитуда силы (R) уменьшается с ростом частоты w. Кроме того, имеет место сдвиг по фазе на величину ф..
Принято зависимость R от частоты называть амплитудночастотной характеристикой (АЧХ). Для рассматриваемой САУ эта зависимость имеет следующий вид.
| ||||||||||||
| 6. УПРАВЛЕНИЕ ПО ПЛАНИРУЕМОЙ ТРАЕКТОРИИ. |
а) Реализуемая нагрузка q должна быть близка к q11 Это требование можно формализовать таким образом: САУ должна обеспечивать в любой момент времени выполнения условия
Конкретные значения e указываются в техническом задании.
б) Возможно применение интегрального критерия «близости» q и q^
1 т
T J (qП - q)2 dt <e
T 0
Конечно, эти примеры не исчерпывают возможные критерии оценки
САУ.
Настройка САУ заключается, в первую очередь, в подборе коэффициентов kj рассмотренных алгоритмов управления. К сожалению, эта процедура не приводит к существенному улучшению качества реализации программы нагружения, так как в любой момент времени учитывается только текущее состояние системы и его предыстория. В настоящее время наиболее эффективным приемом является использование заданной программы нагружения для прогнозирования закона перемещения штока ГЦ с последующей корректировкой сил нагружения посредством П-регулятора. Рассмотрим на нашем примере указанную модификацию алгоритма управления.
Пусть задатчик программы кроме qH выдает еще одно слагаемое:
u = q11 + f(q*)
От функции f(qn) потребуем, чтобы САУ воспроизводила нагрузки на крыло без учета обратной связи. Уравнения состояния подобной САУ имеют следующий вид:
Задатчик:
Усилитель:
i = ki u.
Исполнительный механизм:
dw ,
= k2 * i
u = f(qH)
(1а) (3а)
. (4а)
(5а)
Теперь потребуем, чтобы q = qn. Тогда получим выражение искомой функции в виде
1 dqП k1k2 C dt
Следовательно, сигнал задатчика программы должен формироваться по правилу:
dt
Крыло:
q = C w.
f (q П) =
1 dq
k1 k2C dt
Теперь вместо уравнения (7) приходим к такому:
dq + k1k2 Cq = k1k2 C (q П + 1 dq
dt k1 k2C dt
Рассмотрим, что дает такое изменение алгоритма управления системой нагружения. Построим АЧХ и ФЧХ новой САУ, полагая 5=0. Примем, что qH = coswt. Вычисления, аналогичные предыдущим, приводят к результату:
Jot
Выделяя действительную часть получим:
q = cos wot, R = 1, j = 0.
Теперь амплитуда вынужденных колебаний уже не зависит от частоты, а сдвиг фазы отсутствует (равен нулю). Реакция САУ на «ступенчатое» нагружение может быть найдена из решения следующего уравнения
+ m q = mq П + dqdt ; t = 0, q = q(0).
Здесь qH(t) известная функция времени.
Запишем общее решение однородного уравнения: q = Be- m. Частное решение неоднородного уравнения находим по методу вариации произвольных постоянных:
dq11 dt
dB e -m dB
 | + |
B = A + emqп (t) -qn (0).
Окончательно решение исходного уравнения представим в виде:
q = qП (t) + {q(0) - qn (0)}.
Если начальное значение силы, действующей на крыло и программа нагружения согласованы, то q(0) = qII(0). В этом случае нагрузка на крыло равна программной: q ° qHОднако следует отметить, что этот теоретически правильный и вместе с тем удивительный результат на практике является недостижимым. Объясняется это тем, что уравнения состояния САУ являются некоторой идеализацией реальных объектов, входящих в систему управления. Например, значение управляющего сигнала ограничено по модулю по техническим условиям, а в нашей теории оно может достигать любых значений. Имеет место и идеализация свойств ГЦ: коэффициент k2 зависит от действующей нагрузки, но мы принимаем его постоянным. Тем не менее, полученный результат производит ошеломляющее впечатление: подчиняясь закону П-регулятора, САУ точно воспроизводит заданную программу нагружения. Попытки подбора коэффициентов общего закона регулирования никогда не приводят к такому же эффекту.
7. ОБЩИЕ СВОЙСТВА ЛИНЕЙНЫХ САУ.
Рассмотрим еще один очень важный вопрос: почему блок - схему САУ, описываемую линейными уравнениями, всегда можно представить в виде набора типовых элементов, приведенных в таблице? Для ответа на этот вопрос изучим следующий пример. Пусть один из блоков САУ имеет сложную структуру. Обозначим через u входной, а через x выход- uданный элемент САУ можно составить из простейших, указанных выше блоков.
Примем, что уравнение состояния блока имеет такой вид:
an--+... + a1--+ a0u = x.
Представим, что мы имеем полную систему уравнений САУ и требуется построить общее решение однородных дифференциальных уравнений. Это решение применительно к изучаемому блоку будем разыскивать в следующем виде:
x — Ae1, u — Be1.
Здесь l - характеристическое число.
Подставляя x и u в уравнение состояния блока, найдем связь констант A
и B:
A(an 1 +... + + ^q) — B.
Отметим, что коэффициенты aj, являются вещественными числами. Поэтому корни этого полинома либо вещественные, либо комплексные попарно сопряженные. Это означает, что левую часть уравнения можно преобразовать к виду:
Aan(1 - Яі)...(я -1 )(я2 + mi1+? і)...(я2 + m s1+? s).
В этом выражении коэффициенты 1j mj Vj являются вещественными. Поэтому уравнение состояния блока можно представить в виде произведения ряда дифференциальных операторов:
s--+ ? s) u — x
dt
d d d
an (du ~ 11)'"( du ~ 1 k )(~,7T + m i dd + V i^'"(ddd2 + m dt dt dt 2 dt dt
Теперь становится понятным, что данный сложный блок является суперпозицией последовательно соединенных простых блоков, каждый из которых описывается дифференциальными операторами не выше 2 го порядка. Пример такого преобразования приведен на рисунке.

Аналогично рассматривается и другой крайний случай, когда уравнение блока выглядит следующим образом:
, dmx , dx ,
u — bm-+... + b — + bQx.
m dtm dt Q
Эти примеры показывают, что любая САУ с линейными уравнениями состояния может быть представлена в виде суперпозиции типовых блоков, описанных в вышеприведенной таблице.
8. ПРАКТИЧЕСКИЕ ЗАДАЧИ РАЗРАБОТКИ САУ.
8.1 Автоматизация душа (гипотетический вариант).Допустим, что нам надоело каждый день крутить ручки кранов с горячей или холодной водой для установления желаемой температуры воды и мы хотели бы заранее установить температуру смеси, а на некоторую техническую систему возложить задачу поддержания ее на указанном уровне.
Рассмотрим один из множества вариантов реализации подобной идеи.
Для начала следует подобрать устройство (из серийно выпускаемых), которое назовем задатчиком температуры. Роль этого прибора - выдавать сигнал в виде электрического тока или напряжения, величина которого пропорциональна температуре, устанавливаемой по его шкале. Допустим, что нам удалось приобрести так же краны с электроприводами с такими характеристиками: при изменении входного тока I в диапазоне от +Im, до -Im поперечное сечение крана изменяется на величину AS:
AS =
j- DSm
1 m
Здесь AS m приращение площади сечения для входного тока Im.
Теперь осталось подобрать датчик с прибором для измерения температуры смеси воды, на выходе которого сигнал (ток, напряжение) пропорционален показанию датчика.
Таким образом, мы располагаем следующими элементами будущей САУ:


 |
| U 2 |
Теперь, установив управляемые краны на подводящих трубах с горячей и холодной водой, нам следует решить две важные задачи.
а. Разработать блок-схему автоматического устройства управления.
б. Выполнить согласование сигналов. Может оказаться, что входные и выходные сигналы блоков имеют разные размерности либо разные масштабы. Например, на входы регулятора подаются токи в мА и такой же сигнал на выходе. Но на двигатели кранов необходимо подавать ток в А. Поэтому необходимо решить задачу согласования входных и выходных сигналов соседних блоков САУ, привлекая для этого соответствующие преобразователи. Естественно, что этой задачей должны заниматься специалисты в области измерительной техники.
Представим блок-схему САУ, учитывая сделанные замечания в следующем виде.
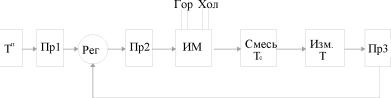
Следует отметить, что обычно в блок-схеме не указывают преобразователи, полагая их включенными в состав основных блоков. Таким образом, принято считать, что размерности сигналов, передаваемых по линиям связи, всегда согласованы между собой.
В заключение примера отметим, что блок «ИМ» состоит из регулируемых кранов горячей и холод- DT=Tn T -
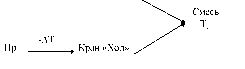
ной воды. Поэтому более де- ......
тальная структура этого блока имеет такой вид:
Однако, на уравнения состояния САУ эта детализация блока «ИМ» никакого влияния не оказывает.
Обратим внимание на положение датчика температуры смеси. Если датчик расположен далеко от кранов, то на функционирование САУ может оказать существенное влияние эффект запаздывания измерения температуры, так как показания датчика соответствуют уже прошедшему моменту времени образования смеси. Причем время «запаздывания» равно расстоянию от кранов до датчика, деленному на скорость течения воды.
8.2 Уравнения состояния САУ
Для вывода уравнений примем, что плотность и теплоемкость воды не зависят от температуры.
Температура воды в смесительной камере.
Обозначим через q^ q,^ расходы горячей и холодной воды подаваемые в смесительную камеру. Тогда температура смеси определяется согласно закону сохранения тепловой энергии:
T = Mr + Mx с (qv + 4x) ’
Здесь Аг и Ах температуры горячей и холодной воды в трубах перед кранами. Мы полагаем их значения постоянными в течение всего процесса регулирования. Расходы же являются переменными величинами и зависят от
проходного сечения кранов.
Состояние задатчика температуры.
Назначение задатчика - устанавливать желаемую температуру воды в душе - ТП .Уравнение состояния самое простое:
ТП = const.
Уравнение регулятора.
Регулятор сравнивает два сигнала: программное значение температуры и результат измерения ее в смесителе. На выходе этого блока имеем сигнал:
AT = kl(TП -T)
Здесь Т - показания измерительного прибора.
Уравнение исполнительного механизма.
Примем, что сигнал от регулятора должен быть преобразован в электрический ток, подаваемый на двигатели кранов горячей и холодной воды. Поэтому в соответствие со сделанными ранее замечаниями имеем:
Ir = k2 AT, Ix =-k3 AT.
Свойства управляемых кранов ранее обсуждались. В соответствии с теми рассуждениями примем, что скорости изменения расходов воды пропорциональны токам:
dqr
dt
dt
= k4
= k 5 Ix
Уравнение связи температур.
В принципе температуры смеси воды и измеряемой - разные из-за погрешностей датчика и аппаратуры. Поэтому можно записать такое соотношение, пренебрегая дрейфом нуля системы измерений температуры:
T = k6 Tc.
Множитель k6 в практических расчетах принимают равным 1.
8.3 Анализ уравнений состояния.
Мы получили полную систему уравнений, исследование которой по существу сводится к решению задачи Коши. Поэтому эта система должна быть дополнена начальными условиями: примем, что при t = 0 заданы не нулевые расходы: qx = qx0, qг = q^.
Преобразуем, полученную систему уравнений путем исключения некоторых функций:
Mr + Mx k dr + dx
d4x
dt
k3 k5(T П - T),
(А)
dt
k2k4 (TП - T).
Дальнейшее рассмотрение задачи выполним для одного частного случая, когда — ^2 k4 .
В этом частном случае суммарный расход горячей и холодной воды остается постоянным в любой момент времени. Тогда из полученной системы следует:
— + hT — hTп, h = kjk3k5k6 Ar ~ Ax .
dt qr + qx
Уравнение по внешнему виду полностью совпадает с уравнением автоматического нагружения крыла, поэтому полученные ранее результаты имеют силу и для этой задачи. Кроме того, данный пример представляет хорошую иллюстрацию практического значения методов теории САУ.
Допустим, что анализ системы уравнений позволил теоретически установить такую величину параметра h, которая обеспечивает стабильную работу САУ и быстрый выход на заданный режим. Тогда коэффициенты усиления блоков необходимо подобрать так, чтобы выполнялось равенство:
h = kkk55k6 4^.
qr + qx
Это соотношение гарантирует приемлемое для нас функционирование реальной САУ.
8.4 Уточнение алгоритма управления.
Обратим внимание на то, что процесс изменения температуры не является колебательным. Температура смеси воды плавно приближается к программному значению. Можно сделать вывод об ошибочности рассуждений о действиях человека. На самом деле процедура принятия решения по изменению расхода воды является более сложной, чем сформулированное выше правило:
dlL — kI ^ — kI dt dt
В действительности человек учитывает еще и среднее значение температуры смеси за некоторый промежуток времени. Поэтому действия человека можно описать приближенно следующим алгоритмом:
4 r 7 J r ’ dt 5 X 8J X
О Ш 0
Полагая, что k3k5 — k2k4 и k3k8 — k2k7 преобразуем систему уравнений САУ к виду:
dT
dt
d<lr — k4 Ir + k, J Irdt, ddtx — k 51, + k8 J Ixdt.
dt
+ hT + V 2 J T (t )dt — hT п + V 2 J T п (t )dt,
AL~Ax
qr + qx
'y
h = ko k5, V — ko k8, k о = kjk 3 k 6
Зададим для этого уравнения начальные условия: при t = 0 T = 0 .
В рассматриваем случае свойства САУ существенно зависят от коэффициентов h и w. Исследуем переходные процессы, а так же амплитудночастотные и фазово-частотные характеристики полученной системы управления.
Реакция на «ступеньку». В этом случае ТП = const. Решение интегро-дифференциального уравнения наиболее просто может быть построено на основе преобразования Лапласа. Обозначим через T* изображение температуры:
T * = J T (t) е - ptdt. о
Из уравнения состояния следует, что
T* =-a + b^; a = hT П, b = V 2T П.
p(p + hp + V 2)
Функция T* является целой, имеет простые полюса в следующих конечных точках комплексной плоскости р:
Рі = ° Р 2 = ^ Рз = Я2,
где 1j - корни уравнения: p2 + hp + V 2 = 0.
В случае h2 < 4w2 корни уравнения будут комплексными
p2 = -d + ig, p3 =-S - ig, d = h/2, g = лІw2 - h2 /4
Решение задачи представим в виде
T = b h --^)e~8t singt -b e~8t cos gt. w g w g w
В этом случае наблюдаются периодические затухающие изменения температуры и с течением времени T ® TП.
8.5 Линеаризация уравнений состояния.
В общем случае k3k5 ф к2к4. Тогда система уравнений становится нелинейной и точное исследование переходных процессов возможно лишь с привлечением численных методов решения задачи Коши. Для построения приближенных решений часто применяется линеаризация нелинейных уравнений состояния. Идея этой процедуры основана на разложении в ряды Тейлора нелинейных уравнений состояния. Допустим, что одно из уравнений имеет вид:
F ( w, w, q, t) = 0.
Пусть известно так же некоторое состояние САУ:
при t = t0 : w = w0,w = W0,q = q0.
Причем F (i&0, W0, q0, ^) = 0.
Нелинейное уравнение F = 0 представим рядом Тейлора, полагая, что приращения параметров состояния малы:
w = w0 + w, w = w0 + w, q = q0 + q, t > t0.
Полагая, что частные производные отличны от нуля и ограничиваясь линейными слагаемыми, получим:
dF q dF q dF q dF, л Л
dw dw dq dtK Q)
Это уравнение - линейное относительно приращений параметров состояния.
Поступая таким образом со всеми уравнениями САУ, мы получаем возможность применить к преобразованным соотношениям стандартные методы исследования. Отметим, что если начальное состояние является установившимся w 0 = 0, то форма уравнений сохраняется и в этом случае.
САУ температурой воды получилась нелинейной лишь из-за уравнения для температуры смеси (А). Пусть в момент времени t0 параметры состояния имели следующие значения:
qr = qr0 , qx = qx0 , Т 0 = k6
дг 0 Ar + дхр Ax
qr 0 + qr 0
Примем, что в момент времени t0 для температур смеси и программной выполнялось равенство: Т0 = Т0П. Теперь введем следующие обозначения приращений параметров состояния:
00
Линеаризация уравнения для температуры смеси приводит к соотноше
qr = qr 0 + ~r, qx = qX0 + , T = T0 + T, TП =І0П + Тп
нию:
k6 r ^x (Tr + Tx).
(qr 0 + qx0)
(Tr0 + qr)Ar + (qx0 + qx )Ax u qr0Ar + qx0A
qr0 + qx0
Уравнения для приращений параметров можно записать в следующем
виде:
Т = k6
Tr (Ar - T0) + Tx (Ax - T0)
qr0 + qx0
Исключая приращения расходов горячей и холодной воды из дифференциальных уравнений, получим основное уравнение задачи:
Т + kq = kT п • k = k (Ar - Т0 )k2 k4 - (Ax - Т0 )k3k5 dt ’ 6 Тг + Tx
Это линейное уравнение содержит приращение температуры смеси горячей и холодной воды и анализ его свойств выполняется по такой же методике, как и ранее.
9. ПРИМЕРЫ НЕЛИНЕЙНЫХ СИСТЕМ УПРАВЛЕНИЯ.
9.1. Центробежный регулятор системы двигатель-генератор.Г енератор электрического тока предназначен для обеспечения потребителей энергией переменного тока (например, напряжение 220 вольт, частота 50 герц). Потребители подключаются к источнику энергии случайным образом. При увеличении мощности потребления необходимо увеличивать крутящий момент на валу генератора, иначе снижаются обороты генератора и, как следствие, уменьшаются напряжение и частота тока. При уменьшении потребляемой мощности наблюдается обратная картина. Для устранения таких явлений применяется центробежный регулятор, назначение которого - поддерживать постоянными обороты двигателя, независимо от потребляемой мощности в диапазоне значений, соответствующем паспортным данным генератора.
| А |
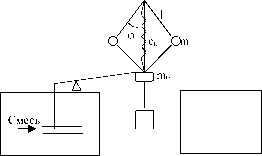 |
Принцип функционирования системы заключается в следующем. Увеличение оборотов двигателя вызывает увеличение центробежных сил, действующих на массу т, поворот стержня l (увеличивается угол ф) и смещение муфты то. Последняя через рычажную систему воздействует на положение дроссельной заслонки. Происходит уменьшение расхода горючей смеси, поступающей в камеры сгорания двигателя, что, в свою очередь, приводит к снижению оборотов системы двигатель-генератор. Таким образом, обеспечивается стабилизация оборотов около установленного среднего значения. Конечно, это весьма упрощенная схема регулятора оборотов, но принцип функционирования сохранен.
Уравнения состояния центробежного регулятора. Для вывода уравнений введем неподвижную систему координат х, y, z. Ось z совместим с осью центробежного маятника, а начало системы координат выберем из условия: для значения угла j = 0 муфта m0 находится в точке z=0 и имеет нулевое смещение w = 0.
Положение плоскости маятника определим углом ?, который образует линия ее пересечения с плоскостью XOY с осью х.
Для записи уравнений движения введем следующие обозначения:
dJ
dt
- угловая скорость регулятора;
ф - угол между стержнем l и осью z; l - расстояние от точки подвеса A до массы т; m, m0 - масса на конце стержня и масса муфты.
c§ - жесткость пружины, соединяющей точку подвеса стержней с муфтой. Длина пружины в свободном состоянии равна 21.
Распределенные массы всех стержней учитываем как некоторые добавки к т, то. Основной параметр состояния - это обороты двигателя wдв. Количество оборотов, задаваемое техническими условиями, обозначим символом с ^. Уравнения системы регулирования можно записать следующим образом.
• Перемещение муфты:
• Сечение канала подачи топливной смеси:
• Угловая скорость центробежного маятника:
dt
Характеристика двигателя. Примем простейшую зависимость - крутящий момент на валу пропорционален расходу топливной смеси:
дв
(4)
Уравнение движения роторов системы двигатель-генератор: dw ддв
(5)
+ k3Сдв + Мген = Мдв ¦
dt
Здесь Мген - крутящий момент, определяемый нагрузкой на генератор потребителями электрической энергии.
Система уравнений не является полной. К записанным уравнениям необходимо добавить уравнение движения центробежного маятника. При его выводе следует учесть, что маятник принудительно вращается через редуктор от двигателя и представляет собой механическую систему с одной степенью свободы, за которую примем угол j . Уравнение колебаний получим на основе уравнений Лагранжа 2-го рода. Запишем кинетическую и потенциальную энергии движущихся частей маятника. Для кинетической энергии имеем:
™ dj
T = т • -LV dt
2l • (l - cos j).
+ m(w • l • sin j)2 +1 • mc
( dj 2 - і (dw ^2
где w
Потенциальная энергия запишется как
co •w
П = 2 • m • g • l •(l - cos j) + mc • g • w +1 •
Моменты сил трения примем пропорциональными угловой скорости
м = -k •j.
dt
Подставив выражения для энергий в уравнение Лагранжа II рода
d dT dT ап w ----=--+ M,
dt а<& аф аф
получим:
2
U -2 \ d j k dj 1
^2• m + m0 • sin j)--^+ — —— +— m0 •(sin2j)•
a dj Л
V dt j
2 + l dt 2
dt
a g л
m • о2 • sin2j + (2 • m + m0)• —+ c0 •(l - cos2j) sin j = 0
V l 0
Записана полная система уравнений. Для малых углов j (6) переходит в уравнение колебаний математического маятника.
Для установления зависимости оборотов двигателя от параметров системы (1)-(6) исследуем уравнения установившегося режима работы двигателя, полагая, что величины о и j постоянные и. Mген = const. Тогда имеем:
a g л
m • о2 • sin2j + (2 • m + m0 )• —+ c0 •(l - cos2j) sin j = 0.
V l 0
Нижняя граница значений оборотов центробежного маятника определяется условием существования нетривиального решения. Из системы (1), (2), (4), (5) получим ещё одно уравнение:
}дв
Полагая в этих соотношениях од
k3 • 0дв + Mген = k2 • (S0 - k1 • 21 • (1 - COs j))
.П
>дв = одв , о = k4 • одв и задавая значение одв, определим параметры настройки регулятора из условия совместимости решений относительно угла j .
Линеаризация уравнений состояния.
Система (1)-(6) является нелинейной и её исследование возможно лишь с применением численных методов. Однако в некоторых случаях возможно применение аналитических методов. Поясним это на примере уравнения (6), которое запишем в виде:
F (j, j, j, о )= 0.
Предположим, что существует и известно в некоторый момент времени
состояние:
F (j 0j 0,j0,о 0 )= 0.
Изменение параметров во времени представим как малые добавки к известному состоянию:
j = j0 + dj, j = j0 + dj, j = j0 + dj, о = о0 + da .
Разложим функцию F (j ,j ,ф,о) в ряд в окрестности j0,j0,<p0,a 0 по степеням приращений параметров и, ограничиваясь первыми степенями, получим:
9.2. САУ релейного типа.
Подобные системы управления содержат исполнительные устройства, которые функционируют по принципу «включено» - «выключено». Устройства такого типа принято называть реле. Формальное определение следующее: реле - устройство, предназначенное для автоматической коммутации электрических цепей по сигналу извне. Подобные элементы широко применяются в бытовых электроприборах: калориферах, электропечах, кофеварках и тому подобное. Многие из них имеют тепловые реле, которые подключают бытовой прибор к источнику электрической энергии, как только температура прибора становится меньше заданной, и отключают от источника при её превышении. К достоинствам таких регуляторов следует отнести низкую стоимость в изготовлении и высокую надёжность по условиям эксплуатации. Недостатком является невысокая точность поддержания заданной температуры, однако вполне приемлемая для бытовых целей.
fdFл
fdFл
fdFл
f dF_ ^
da
Sp +
Sp> +
Sep +
ga = 0.
dap
dp>
dp
00
00
00
К этому уравнению применимы все ранее рассмотренные методы Весьма простые уравнения можно вывести для исследования отклонения от стационарного состояния. Например, для уравнения (6) получим:
dF
= 2ma02 cos2p0 +(2 • m + m0) — cosp0 + 3c0 sin2p0 sinp0
dj
dF
dp
00
dF
fdF л
da
= 2m a0 sin2p0.
Л
= 2m + m0 sin p0,
dap
00
00
00
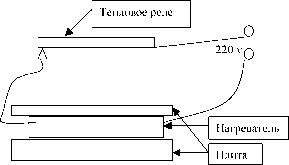
Наша задача - изучить функционирование САУ релейного типа на простом хорошо знакомом примере. В качестве объекта рассмотрим бытовой электрический прибор - утюг. На рисунке изображены основные элементы прибора и электрическая схема их соединения. Здесь не показан кожух утюга, внутри которого установлены: устройство задания температуры, тепловое реле, электропроводка, нагрева
тель,
Описание работы САУ. В начальный момент времени t=0 при подключении утюга к электрической сети температура биметаллической пластины Тпл рав-
на комнатной и меньше заданной (программной) Тп. Поэтому контакты теплового реле замкнуты и электрический ток проходит через нагревательный элемент. Выделяющееся тепло увеличивает температуру элемента Тн, повышает так же температуру плиты и биметаллической пластины. При достижении
п
температуры пластины заданной T размыкаются контакты теплового реле и утюгом можно пользоваться. С течением времени из-за потерь тепла происходит остывание элементов бытового прибора, в том числе и биметаллической пластины. Как только её температура становится меньше Тп, снова замыкаются контакты реле и процесс установления заданной температуры повторяется.
Уравнения состояния САУ. Вывод уравнений теплопередачи между элементами прибора основан на использовании закона сохранения энергии и применении закона Ньютона для вычисления тепловых потоков между двумя телами разной температуры.
| Ниже в таблице приведены теплофизические параметры тел в процессе обмена энергией. __ | |||||||||||||||
| |||||||||||||||
|
Здесь т -масса, c -теплоёмкость тела, h -коэффициент теплопередачи, S -поверхность контакта. Для упрощения вывода уравнений схема нагрева биметаллической |
Сравним состояния тел в моменты времени t и t + At: t: Т Т Т Т
н? ш? бм’ 0 •
За время At происходит следующие изменения температуры:
t + At : Тн + АТн , Тпл + АТпл , Тбм + АТбм , Т0 .
Здесь принято, что изменением температуры окружающей среды можно пренебречь. Составим уравнения баланса тепла, обозначая потери тепла через AQ0:
тн • Сн •АТ, + h2 • S2 •(Тн - Тпл )-At = W-At,
т,ш • Спл -АТ,ш + [h3 • S3 • (Тпл тбм • Сбм 'АТбм - h3 • S3 ІТпл
Тбм )+h -S, • (Тпл - То )-h2 S • (Тн - Тпл )]• А = 0,
Тбм )-А! = 0,
Т )• At.
h, •S, •(Тп
AQо =
Качественная проверка полученных соотношений основана на анализе размерности всех слагаемых, а сумма уравнений показывает распределение мощности нагревателя по частям бытового прибора и теплопередачу в окружающую среду. Деление всех уравнений на Dt и переход к пределу Dt ® 0 приводит к дифференциальным уравнениям задачи (уравнения состояния), ¦ сн ¦ ^ + h ¦ S2-(Т, -Тпл) = W, dt
dTn
dt
+h ¦ S3-(Тпл -t&„)+hi -s,-(r,Тпл ) = 0,
To)-h2 ¦ S2 ¦(T,пл Спл
dT
h3 ¦ S3 -(Т,ш - Тбм ) = 0,
бмбм C бм
dt
dDQ o dt= h,-S,\Т„ - To )
Теперь запишем уравнение теплового реле:
W0, если Тбм > Т
0,
если Тбм < Т
Проще это соотношение можно представить с помощью функции Хевисайда:
W = W0 -h(Тбм - ТП).
Полученная система уравнений является полной. Её решение можно построить лишь на основе численных методов (задача Коши). Для этого необходимо поставить начальные условия:
При t = 0 Тбм = Тпл = Тн = Т0 = °-
10. ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ САУ
Рассмотрим систему управления, в которой состояние объекта характеризуется элементами вектора-столбца x, являющимися функциями времениХТ = {х,, Х2, Х3,..., xn }.
Во многих случаях элементы Xj измеряются непосредственно в системе
управления и их принято называть параметрами наблюдения за состоянием объекта. Однако зачастую непосредственное измерение некоторых параметров Xj является невозможным и за параметры наблюдения принимают другие физические величины у, У2 Уз,...,У к причем число этих величин может и не равняться n. Образуем из элементов у j вектор столбец у
УТ = {Уь У2’...’ Ук }.
В общем случае число параметров управления Uj (управляющих сигналов) m отличается от n .Введем обозначение
u = {u1 ’ u2 um } •
Тогда уравнения состояния САУ можно описать следующими уравнениями:
— = A • x + B • u, у = C • x + 5, u = F(xп, у). dt
Здесь A, B, C матрицы, размерность которых согласована с введенными выше векторами, F вектор-столбец, элементы которого являются функциями компонент xп, y; xп - программные значения параметров состояния объекта управления; вектор-столбец 5 учитывает ошибки в системе измерений параметров наблюдения у. Отметим, что векторная функция F реализует принятый в САУ алгоритм управления.
Параметры x в любой момент времени t можно трактовать как точку в n -мерном пространстве состояний объекта. Множество значений x образует некоторую линию (траекторию) в этом пространстве. В связи с этим принято говорить, что xп -является планируемой траекторией в пространстве состояний.
Основные задачи общей теории САУ следующие.
• Исследование устойчивости системы управления.
• Построение общего решения уравнений состояния.
• Исследование управляемости САУ.
• Изучение влияния помех на значения параметров состояния.
• Разработка алгоритмов управления.
Рассмотрим решение некоторых задач для линейных уравнений состояния.
Управление по планируемой траектории.
Примем, что элементы матриц A, B константы, n = m = k. Кроме того, матрица C единичная. В этом случае параметры наблюдения и состояния совпадают, поэтому:
у = x + 5.
Управляющий сигнал u будем задавать в виде суммы u = u* + F (xп, x + d),
где u* функция, которую надо определить из первого уравнения состояния, подставляя в него xп :
dx п п
dt
Теперь уравнения состояния САУ запишем в виде
dx
dt
(a)
A • x + B • u,
Построение общего решения уравнений состояния.
Решение дифференциальных уравнений состояния основано на обобщении известных методов. Это решение рассмотрим на примере уравнения, которое следует из (а): dx
— = A • x + f . dt
Примем, что элементы матрицы A не зависят от времени, а вектор f является заданной функцией t. Построим решение уравнения (задача Коши). для начальных условий: при t = 0 x = x0, где x0 - вектор-столбец начальных значе-
ний параметров состояния.
Решение однородного уравнения
dx
dt
будем искать в виде ряда
по степеням t :
2 3 4
x = Со + c • t + C2 • t + C3 • t + C4 • t .....
Здесь Cj неизвестные вектора-столбцы порядка n. Подставляя это представление в однородное уравнение и приравнивая коэффициенты при одинаковых степенях t, выразим вектора Cj через с0 :
Cj = IA
j j!
Теперь степенной ряд можно представить в виде
| t3 + -• A4 • t4 +... 4! |
t2 + • A3 3!
Здесь E единичная матрица размерности n x n. Выражение в квадратных скобках является матрицей и оно аналогично разложению показательной
функции e1t в ряд по степеням t. Введём показательную матричную функцию, которую определим как сумму следующего бесконечного ряда:
eAt = E + • A• t + — • A2 • t2 + • A3 • t3 + — • A4 • t4 +....
1!
2!
3!
4!
Отметим основное свойство этой функции: deAt = A • eAt. Тогда решение од-
dt
нородного уравнения запишем в виде
At
Здесь C0 - вектор-столбец произвольных констант.
Частное решение неоднородного уравнения будем строить по методу вариации произвольных постоянных
x = eAt ¦ a(t),
где a(t) - вектор-столбец с неизвестными элементами, зависящими от времени. Подставляя это представление в исходное уравнение, получим систему для определения вектора a(t) : eAt ¦ da(t) = f ’ dt f ‘
Интегрируя, получим:
a(t)=Je~At ¦ f (t)¦ dt.
0
Окончательно решение поставленной задачи представим в следующем
виде:
t
x = eAt ¦ c0 + eAt ¦ J e~At ¦ f (t) ¦ dt.
0
Исследование устойчивости системы управления.
Устойчивость системы управления для нелинейных уравнений состояния, как правило, исследуют на основе численных методов.
Для линейных уравнений можно использовать преобразование Лапласа с применением известных критериев устойчивости. Рассмотрим постановку подобной задачи. Преобразуем уравнение (а) полагая, что закон управления, определяемый функцией F, является линейным:
F = D¦(xП -x)+ d.
В этом случае уравнение состояния (а) преобразуем к виду:
— = (A - B ¦ &)¦ x + j , j = B ¦(d ¦ xП + d)+ —--A ¦ xП.
dt dt
Полагая, что элементы всех матриц являются константами, применим к уравнению состояния преобразование Лапласа по времени. Для изображений функций введем обозначения
X(p)=Jx(t)•e-pt ¦ dt, F(p)= J j(t)•e-pt ¦ dt .
00
Тогда получим уравнение для изображений
p ¦X(p)-xo =(a - B ¦D)X(p) + f(p).
Здесь x0 -начальные значения параметров состояния САУ.
Из последнего соотношения следует, что решение задачи имеет вид:
X(p)=(e ¦ p -(a - B ¦D))-1 ¦ (f(p) + xo),
где E - единичная матрица порядка n. Обратное преобразование определяет вектор-столбец параметров состояния: a+i?
1
2pi
x(t)
IX (p)-eptdp.
a-i?
Для устойчивости системы автоматического управления необходимо и достаточно, чтобы полюса подынтегральной функции лежали в правой полуплоскости комплексной плоскости p. Полюса функции определяются нулями
определителя матрицы:
E • p-(A - B • D) = 0.
В развернутом виде определитель представляет собой полином следующего вида:
Со pn + Cl pn-1 +.... + си-1 p + cn = 0.
Для подбора параметров САУ удобно воспользоваться критерием Рауса-Гурвица:
С1 С0
С3 С2
Сі
С3
Со > 0, Cl > 0,
> 0, . . .
С1
Сп
С5 С4 С3
Все определители до порядка n включительно должны быть положительными. Обратим внимание, что на главной диагонали определителей располагаются коэффициенты С1,С2,С3,... до Сп включительно. При движении влево от диагонали номера возрастают, а вправо - убывают. Если индекс отрицательный или больше п, то коэффициент принимается равным нулю.
11. ДИСКРЕТНОЕ УПРАВЛЕНИЕ.
Автоматическое управление с применением ЭВМ в качестве регулирующего устройства называют управлением дискретного типа. Применение термина «дискретный» обусловлено тем, что изменение управляющих воздействий для исполнительных устройств производится не непрерывно, как в предыдущих примерах, а в дискретные, как правило, равноотстоящие моменты времени. Это вызвано тем, что по командам программы ЭВМ производит опрос значений параметров состояния САУ, затем выполняется обработка данных, введенных в оперативную память, вычисление управляющих сигналов и выдача последних на регистры управляющих устройств. На указанные действия требуются определенные затраты времени работы процессора ЭВМ, которые не должны превосходить интервал дискретности изменения управляющих сигналов.11.1 Управление механизмом графопостроителя.
В качестве объекта исследования САУ дискретного типа рассмотрим задачу управления движением каретки графопостроителя. Для лучшего понимания проблемы сначала рассмотрим непрерывное (аналоговое) управление указанным процессом, а затем исследуем эффект дискретности.
| Шкив 1 | |||
| каретка | Шкив 2 | ||
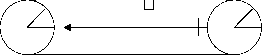
Механизм графопостроителя (ГП) предназначен для рисования на плоскости чертежей, рисунков, схем и тому подобных изображений. Механизм имеет несколько степеней свободы: перемещение каретки с перьями для рисования в плоскости с координатами x,y, перемещение перьев (команды «поднять», «опустить»). Мы рассмотрим упрощенную модель ГП, состоящую из двух шкивов, на которые натянута гибкая нерастяжимая нить так, что между ними отсутствует скольжение при вращении шкивов. На нити укреплена каретка ГП. Таким способом вращение шкивов перемещает каретку по оси x.
Эта модель является механизмом с одной степенью свободы. Обозначим через фі, ф2 углы вращения шкивов и r\, Г2 их радиусы. Пусть x определяет положение каретки ГП на оси. Примем, что для положения каретки в начале координат углы поворота шкивов равны нулю. Тогда имеют место равенства:
X = Гх ¦ jl5 X = r2 ¦ j 2
Это условие не имеет принципиального значения, так как несложно учесть ненулевые значения углов поворота шкивов при х = 0.
Координаты каретки ГП являются заданными функциями времени, определяющими уравнение линии, которую необходимо нарисовать. Следовательно, управление упрощенной моделью ГП должно обеспечить движение каретки
по закону: х п = х п (t).
| Изобразим блок-схему САУ ГП. |
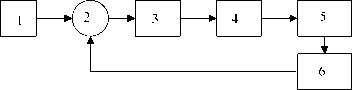 |
Задающее устройство (1). На выходе блока сигнал и = хп (t), который определяет закон перемещения каретки во времени.
Регулятор (2). На вход подаются сигналы хп и х, а на выходе - результат их сравнения Ах = хп - х.
Преобразователь-1 (3). На выходе преобразователя электрический ток, пропорциональный выходу регулятора j = k -Ax.
Двигатель (4). Ток определяет крутящий момент на валу двигателя. Этот момент считаем пропорциональным j : M = &2 - j.
Механизм ГП (5). Перемещение каретки из-за поворота шкива 1 равно величине x = т\ - фі.
Преобразователь-2 (6). Это устройство измеряет угол поворота шкива 2 и вычисляет перемещение каретки x = Г2 - ф 2. Будем считать, что измерения выполняются точно, хотя в действительности имеет место ошибки определения положения каретки. Обратим внимание: параметр состояния САУ - координата каретки, а измеряемый параметр - угол поворота шкива 2.
Полученные соотношения содержат шесть неизвестных величин, а число уравнений на единицу меньше. Поэтому дополним систему дифференциальным уравнением движения механизма ГП. Воспользуемся уравнениями Лагранжа второго рода:
d dT dT „
--+ — = Q
dt dq dq
В уравнении приняты обозначения Т кинетическая энергия, q обобщенные координаты, Q обобщенные силы. В нашем случае
Т = 2 - <&1 + I2 - j2 + m0 - x )>
dA = (- k3 - j + M) - dj1 - к4 - j&2 - dj 2 - k5 - x - 8x
Здесь Ii, 12, моменты инерции шкивов с учетом инерции ротора двигателя преобразователя 2 и масса каретки. кз, к4, к5 - коэффициенты вязкого трения, учитывающие потери энергии в механизме ГП; 5A работа обобщенных сил на возможных перемещениях.
Отметим, что для пользователя наиболее информативный параметр - перемещение каретки ГП. Поэтому в уравнениях Лагранжа выберем переменную x в качестве обобщенной координаты. Тогда кинетическую энергию и работу обобщенных сил представим в следующем виде:
С dx ^ 2
Т=
dA =
V dt j
dx
| m = m0 + |  |
- h---+ M / r
V dt
Уравнения движения каретки ГП следуют из уравнений Лагранжа:
dt2
dt
к = к1 - к2 / r1
Исследуем переходные процессы в системе управления для программного перемещения каретки по закону xп = h(t). Примем, что в начальный момент
времени t = 0 каретка находилась в начале координат x = 0, а затем её следует по заданной программе мгновенно переместить в точку x = 1. Можно заранее утверждать, что такое перемещение каретки невозможно. Поэтому расчет реального движения механизма позволит оценить время перемещения каретки и выявить свойства системы управления. Запишем решение характеристического уравнения
Я12 =(- h ±лІh2 - 4 • m • к)/2• m.
Примем во внимание, что на этапах проектирования и изготовления механизма ГП принимаются меры по уменьшению трения. Поэтому корни уравнения будут комплексными Х12 = -m ± i • w.
Тогда движение каретки ГП будет происходить по закону:
x = 1 + C1 • e -m4 cos w • t + C2e -m4 sin w • t.
Постоянные, входящие в решение уравнения состояния определяем из начальных условий: в момент времени t = 0, x = 0, x = 0.
C1 =-1, C2 = m/w.
Каретка ГП движется в направлении точки x = 1, затем переходит её, возвращается и долго колеблется около заданного положения. Подобное движение механизма недопустимо для решения задачи построения графика.
Приведенный здесь рисунок дает наглядное представление о движении каретки ГП.
Отметим, что заданная траектория перемещения каретки является нереальной, так как следует каретку мгновенно переместить из состояния покоя на расстояние Ax = 1 и остановить. Более реальной может быть такая программа
перемещения:
•а-
( p • t^
1 - cos-
I T
Этот закон перемещения соответствует действиям человека при перемещении механизма «вручную» за время T: сначала разгон каретки, затем перемещение с почти постоянной скоростью t» T /2 и торможение с остановкой в точке x = а в момент t = T .
Управление по планируемой траектории.
Задача улучшения процесса управление механизмом остается нерешенной и для нового закона перемещения. Идея учета планируемой траектории заключается в том, что задающее устройство наряду с xП выдает дополнительный сигнал f (t), значение которого подбирается по условию: действительная
траектория совпадает с планируемой. Запишем уравнение состояния для принятого алгоритма управления:
m--— + h •— + к • x = к • xП + к • f.
dt2 dt
Сформулированное ранее условие приводит к требованию x = xП. Тогда для дополнительного управляющего сигнала имеем
2„ П
dx
dt
f=
dt
11.2 Применение ЭВМ в системах управления.
Анализ блок-схемы п. 11.1 приводит к заключению: на ЭВМ можно возложить обработку любых данных. Для этого достаточно лишь разработать соответствующую программу. В нашем случае ЭВМ будет заменять такие блоки САУ:
• задающее устройство,
• регулятор,
• преобразователь 1,
• преобразователь 2.
Система управления ГП, рассмотренная в разделе 11.1, примечательна тем, что в любой момент времени в ней формируется управляющее воздействие на исполнительный механизм. Подобные системы принято называть непрерывными (аналоговыми). Применение же ЭВМ для задач управления приводит к таким следствиям.
• Для решения указанных выше задач требуется выполнить определенное количество команд программы ЭВМ, на что затрачивается конечное время процессора Dt. В течении этого интервала времени ЭВМ «молчит», то есть не управляет движением механизма ГП. Таким образом, управление механизмом ГП стало «дискретным». Управляющие воздействия «выдаются» в моменты времени tk = к • Dt, к = 0,1,2,....
Данные в ЭВМ представляют собой двоичный код. Поэтому для согласования ЭВМ и устройств механизма ГП нужны дополнительные устройства: ЦАП - преобразователь двоичного кода в аналоговый сигнал, АЦП - преобразователь аналогового сигнала в двоичный код. Примером такого преобразователя является модем, применяемый для подключения ЭВМ к сети Internet через телефонные линии связи.
Для синхронизации функционирования ЭВМ, ЦАП и АЦП в блок-схему управления САУ должны быть введены «часы» - счетчик времени (таймер), задача которого выдавать в моменты времени tk сигнал в виде импульса электрического напряжения (тока) на ЭВМ, ЦАП и АЦП.
Появляется уникальная возможность реализовывать любые алгоритмы управления, применять измерительные устройства и исполнительные механизмы с любыми ха-
| код |
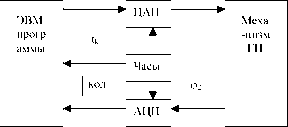 |
Отметим, что теперь следует изменить блок-схему САУ
Проследим за событиями в системе дискретного управления. Для этого введем обозначения параметров состояния:
tn = п ¦&, п = 0,1,2,...; хп = x(tn X Xп = X(tn X
Xn = хП (tn + d), Jn+1 = k1 ¦ \хЦ - Xn } j2n = j2 (tn ).
Здесь 5 интервал времени, который подбирается из условия мини
| мального запаздывания. Обычно принимают d » kDt. Теперь, для наглядности, функционирование системы отобразим для любого временного интервала в табличной форме.____ | ||||||||||||||||||
|
| tn-1 | Jn-1 | j2n-1 | tn-1 < t < tn |
Расчет xn-1, x” (tn-1 + d), Jn |
Движение в направлении x ® xn, Ф2 ®j2n |
• как происходит движение каретки ГП,
• методы исследования устойчивости САУ.
Конечно, эти задачи взаимосвязаны и решение первой даст ключ к пониманию второй. Поэтому сначала рассмотрим движение каретки ГП в момент времени tn < t < tn+l . Отметим, что в начальный момент времени t = tn выполняются условия: x = xn, x = xn.
Наша задача: по уравнениям движения вычислить новое положение каретки и определить управляющий сигнал для следующего интервала времени. Теперь уравнения движения механизма выглядят иначе, так как в правой части необходимо указать ток, подаваемый на двигатель, который остается постоянным в течение всего интервала времени. d2 x , dx k2
m ' ~TY + h '~d = ' jn, tn <t < tn+l .
dt2 dt r1
Решение дифференциального уравнения второго порядка представим
в виде:
x = -^Jn •(t-tn)+ ^1 + c2 'e m
(t-tn )
r1 ' h'
Введем для удобства записи решения управляющий сигнал
un =
k2 ' Jn
r1 ' h
Для определения постоянных величин C1, C2 воспользуемся начальными условиями. Тогда движение каретки определяется формулами:
x = un ¦(t - tn ) + xn - m (un - xn )'(l - e ~h{t-tn )lm )
"nf ' ~~n ; y^n ~'n,
h
x = un -(un - xn )' e
~h(t-tn Уm
Это решение позволяет вычислить для следующего момента времени положение каретки ГП, её скорость и управляющий сигнал - ток:
xn+1 = и
= u„ -At + x„ - m (u„ - xn )'(l - e -hDtm),
(un - x&n)' Jn+1 = k1 Vn - xn )
= u - (u
n+1 n x n
-hDt/r
Введем вектор-столбец параметров состояния системы управления перемещением каретки ГП
bn = {Xn , Хn , Jn } •
Полученное решение позволяет вычислить значения параметров состояния в любой дискретный момент времени по рекуррентному уравнению:
bn+\ = A ¦ b n + an •
1, - (l - e ~hAt/m )i At - m (l - e ~hAt/m)
h} k hy ’
Здесь введены обозначения: m
0
(l e -hAt / m )
-hAt / m
0, e
-ki, 0
0
- k1 x
Это решение является основой для исследования переходных процессов в САУ, разных алгоритмов управления, в том числе и управления по планируемой траектории. Для численного изучения устойчивости достаточно принять, что xП = 0, а в начальный момент времени заданы начальные условия по смещению и скорости x0, х0.В этом случае решение однородных уравнений
представим в виде:
bn+1 = A ¦ b0, b0 = {x0 , X0
Движение каретки является устойчивым, если с течением времени её перемещения и скорости стремятся к нулю. Для этого необходимо, чтобы существовал предел:
lim An = 0, при n ® ? .
В теории матриц установлено, что существование такого предела эквивалентно условию: собственные числа матрицы A должны быть по модулю меньше 1. Это требование дает возможность подобрать наилучшим образом параметры САУ.
12. ЭЛЕМЕНТЫ РОБОТОТЕХНИКИ.
Термин робот (robot) ввел в литературу писатель К. Чапек, называя этим словом искусного в работе человека. Затем это слово перешло в фантастическую, а далее и в техническую литературу. Формальное определение термина робот - это многозвенный шарнирный механизм, применяемый для замены человека в производственной, научной и социальной сфере. В настоящее время под термином робот подразумевается комплекс устройств, в котором можно выделить такие основные три части.• Исполнительные органы - многозвенный механизм с двигателями и автономными, либо внешними источниками энергии. Механизм предназначен для воздействия на окружающую среду.
• Чувствительные элементы - система датчиков и преобразователей для сбора информации о состоянии среды и исполнительных органов.
• Система обработки информации для принятия решений и управления исполнительными органами.
Сфера применения роботов - от космоса до подводного мира.
В настоящее время принята следующая классификация промышленных роботов.
1.Манипуляторы, управляемые человеком.
2 Роботы с циклическим повторением некоторой одной и той же программы.
3. Роботы с модифицируемой программой деятельности. Сюда относятся станки с ЧПУ и тому подобные механизмы.
4. «Обучаемые» роботы, работающие по принципу воспроизведения один раз показанной программы действий.
5. Интеллектуальные роботы, способные ориентироваться в окружающей среде и принимать нетривиальные решения.
Из множества задач в теории робототехнических систем выделим для начального знакомства следующие.
• Связь локальных координат звеньев робота и глобальных координат, относительно которых происходит движение механической системы.
• Описание динамических свойств и задача управления движением робота.
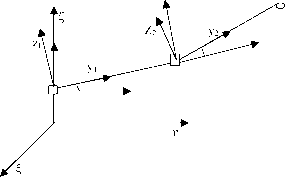
12.1 Локальные и глобальные системы координат.
Введем неподвижную систему координатX,h,Z для описания движения робота и его частей в пространстве. Её выбор произволен и подобную систему принято называть глобальной. Положение звеньев робота фиксируется локальными системами xn, yn, zn. Каждая локальная система координат определяет
одну степень свободы звена относительно соседнего. Подобный подход позволяет весьма просто и однозначно описать, например, перемещение предмета кистью робота. В локальной системе, связанной с кистью предмет неподвижен, но матрицы связи локальной и глобальной системы координат зависят от степеней свободы звеньев робота. Изменение степеней свободы приводит к движению многозвенного механизма и тем самым к перемещению предмета.
Общая идея по изучению связи систем координат - это представление сложного преобразования как суперпозицию простейших. Поэтому рассмотрим следующие базовые преобразования.
• Поступательное перемещение
• Масштабирование измерений в локальной системе относительно глобальной системы координат.
• Вращение локальных осей относительно глобальных на углы
a ,р ,?.
Для установления связи глобальных и локальных координат какой-либо точки следует выполнять такие условия: а) до преобразования локальные и глобальные оси совпадают, б) координаты точки в локальной системе остаются неизменными.Обозначим через a, b, c перемещение начала локальных осей x, у, z относительно глобальных X ,h,Z ¦ Тогда связь между проекциями одной и той же точки представим в виде векторов-столбцов:
| ||||||||||||||||||
| Пусть l, m,n множители, изменяющие размеры тела в глобальной системе координат. Соответствующее преобразование представим формулой |
| 'X' | l • x' | |
| h | > = < | m • у * |
| X, |
n • z k. J |
(2)
| Вращение локальной оси x относительно глобальной X на угол а приводит к преобразованию, которое удобно представить введением матрицы поворота: | ||||||||||||||||||||||||
| ||||||||||||||||||||||||
| Для преобразования вращения оси у относительно h на угол р имеем: |
| 'X' | cosp 0 sin p | x | |
| <h | = | 0 1 0 | < у |
| X, | - sinр 0 cosp |
z V J | |
| Вращение оси z на угол ? п | |||
| 'X' | cosq - sinq 0 | x | |
| <h | = | sinq cosq 0 | у * |
| X, | 0 0 1 |
z V J |
(5)
Формулы (1)-(5) определяют все простейшие преобразования. Отметим, что преобразование (2) можно представить стандартной формой:
| r | "A | 0 | 0“ | x | |
| h | = | 0 | m | 0 | y |
| z. | 0 | 0 | v |
z V J |
| Р = |
|
10 0 a 0 10 b 0 0 1 с 0 0 0 1
- матрица переноса, р = Ttr.
A 0 0 0'
0 m 0 0 0 0 v 0 0 0 0 1
матрица масштабирования, р = Tsr.
Ts =
10 0 cosa 0 sin a 00
00 - sina 0 cosa 0
матрица поворота, р = R r
Rx =
, - матрица поворота, р = R r.
cos# sin# 0 0
, - матрица поворота, p = R r.
- sin# cos# 0 0 0 0 10 0 0 0 1
Для иллюстрации представления сложного преобразования с помощью простейших введём несколько вспомогательных систем координат r1, r1, r3.... Их
число вместе с системой r равно числу простейших преобразований. Следует иметь в ввиду, что до осуществления сложного преобразования все системы координат совпадали с глобальной - p.
Теперь рассмотрим задачу: точку r0, определенную в системе координат r, переместить относительно системы r1 на расстояния (2,4,1), затем увеличить координаты относительно осей r2 в 2 раза, зеркально отобразить относительно плоскости х3, у3 системы координат r3 и, наконец, повернуть относительно оси X на угол 300 . Образуем матрицы:
| “1 | 0 | 0 | 2" | “2 | 0 | 0 | 0" | “1 | 0 | 0 | 0" | ||
| 0 | 1 | 0 | 4 | , Ts = | 0 | 2 | 0 | 0 | , To = | 0 | 1 | 0 | 0 |
| 0 | 0 | 1 | 1 | ’ s | 0 | 0 | 2 | 0 | o | 0 | 0 | -1 | 0 |
| _0 | 0 | 0 | 1_ | _0 | 0 | 0 | 1_ | _0 | 0 | 0 | 1_ |
0
0
0
Решение поставленной задачи дано формулами: r1 = Ttr0, r2 = ^ r3 = Tor2, Р = RX r3-
Исключив вспомогательные системы координат, представим сложное преобразование в виде:
p = Rx ¦ To ¦ Ts ¦ Tt ¦ r0-
Следует отметить, что перестановка матриц в общем случае недопустима, так как эта операция приводит к другому преобразованию.
12.2 Уравнения движения робота.
Большинство роботов представляет собой многозвенный механизм с многими степенями свободы. Изменение параметров степеней свободы производится двигателями, снабженными редукторами. Обычно двигатель устанавливается на одном звене и перемещает или поворачивает соседнее звено. Таким образом, дополнительные усилия (моменты) взаимодействия между звеньями из-за двигателя оказываются самоуравновешенными. Основой для изучения динамических свойств являются уравнения Лагранжа 2-го рода.
В качестве примера рассмотрим задачу управления простейшим двухзвенным механизмом.
Примем, что движение звеньев механизма происходит в плоскости, которая может поворачиваться относительно оси Z . В этом случае, манипулятор имеет 3 степени свободы. В качестве их примем углы a1, а2 и ?. Будем считать заданными длины lj, массы, статические моменты и моменты инерции -mj, Sj, Ij звеньев j = 1,2. Полагаем, что в массовые характеристики 2-го звена
включены свойства детали, которую перемещает манипулятор. Для определения положения звеньев в пространстве введем следующие матрицы.
| “1 | 0 | 0 | 0" | “1 | 0 | 0 | 0" | “1 | 0 | 0 | 0" | ||
| 0 | 1 | 0 | 0 | 0 | 1 | 0 |
l1 0 | 0 |
cosa1 sina1 |
- sina1 cosa1 | 0 | ||
| 0 | 0 | 1 | h | и | 0 | 0 | 1 | , R = | 0 | 0 | |||
| _0 | 0 | 0 | 1 _ | _0 | 0 | 0 | 1_ | _0 | 0 | 0 | 1_ |
| “1 | 0 | 0 | 0" | cosq | sinq | 0 | 0" | ||
| 0 |
cos a2 sin a2 |
- sina2 cos a2 | 0 | - sinq | cosq | 0 | 0 | ||
| R2 = | 0 | 0 | , Rz = | 0 | 0 | 1 | 0 | ||
| _0 | 0 | 0 | 1_ | _ 0 | 0 | 0 | 1_ |
Pi = R1 Т1Г1, P2 = R2T2R1 Tir2 .
Вычисления кинетической энергии по найденным координатам связано с громоздкими вычислениями. Поэтому упростим задачу, приняв, что движение звеньев происходит в плоскости J = 0. В таком случае будем исследовать механизм лишь с двумя степенями свободы. Представим уравнения Лагранжа для упрощения дальнейших вычислений в следующем виде:
d dL dL
= Qj, L = Т-П, j = 1,2.
dt da,
|
da j Для точек оси звеньев имеем: | ||||||||||||
|
hi = уі cosai, Zi = h + yi sinai, h2 = l1 cosa1 + y2 cos(a1 + a2), Z 2 = h +11 sina1 + y2 sin(a1 + a2)
Теперь выражение кинетической и потенциальной энергии можно записать в следующем виде:
2Т = 2 |(?72 + % 2 )dm + 2 |(т72 + %2 )dm,
2(1) 2 (2)
П = Jg • h • sina1dm + Jg • h • sina2dm.
(1) (2)
Уравнения Лагранжа приводят к соотношениям:
ск{і1 +12 + l1S2 cosa2 + lj2m2)+ a
T l1S 2
I2 + -^cosa
a2(a + 2 a2)l1S2 sin a2 +
v 2
g(S1 + m2l1)cosa1 + gS2 cos(a1 + a2) = M1
l1S2
2
+ a212 + a2 (a + 2a2 )l1S2 sina2 + gS2 cos(a1 + a2) = M2.
cos a
Здесь введены обозначения:

Ij =Jу2 •dm, Sj =Jyj •dm, mj
lj lj
12.3. Управление движением робота.
Для управления роботом обычно задают траекторию перемещения предмета захватом манипулятора. В нашем случае полагаем, что заданы две функции:
h п = h п (t), Z п = Z п (t).
Вторая часть задачи - определение степеней свободы манипулятора ax,a2 по заданным функциям траектории перемещения предмета. Это - весьма
сложная задача. В общем случае решение этой задачи является неопределенным из-за того, что число степеней свободы превосходит число уравнений. Даже в рассматриваемом случае имеем сложную нелинейную систему уравнений:
h 77 = y^osaf, Z іП = h + У\ sin a77,
h П = l1 cosa П + y2 cos(a1n + a f), Z 2П = h +11 sin a f + y 2 sin(af + a f) Будем считать, что эта система решена и найдены функции: af (t), a 2П (t).
Для алгоритма управления током двигателей примем пропорциональный закон:
js = ks (aS - as X S = 1 2. (7)
Полагаем, что моменты двигателей манипулятора пропорциональны то
кам:
(8)
Ms = ks+2 ¦ js , s = 1 2.
Полученные ранее уравнения движения манипулятора и соотношения (7), (8) образуют полную систему уравнений состояния САУ перемещением предмета. Недостатки пропорционального закона управления хорошо известны. Для их устранения следует применить алгоритм управления по планируемой траектории. Для этого представим уравнения движения в обобщенном виде:
= k3 k1(a(I - a1)
= k4k2(aп - a2).
d дЬ дЬ
dt дос1 da1 d дЬ дЬ dt д(Х2 дa2
Как всегда положим, что выход задающего устройства представлен сиг-
функции времени, подлежащие опре-
налами a/7 + u1, и a
+ u 2, где U1, u 2
делению из условия: движение звеньев робота должно соответствовать про-
граммному - a7 (t), a 21 (t). Тогда из уравнений движения имеем:
d дЬ дЬ
при a j = a
u2 =
^ dt дa2
дa
k 3 kid dL dL
У dt d(X1 da1 j
при
u1 =
Отметим, что в данном случае управление системой не имеет целью затратить работу на накопление потенциальной энергии механизмом робота, так как для идеальных условий (отсутствует трение) на перемещение предмета в итоге вообще не затрачивается работа. Здесь главная задача - обеспечить заданное изменение степеней свободы манипулятора.
Для реализации процесса перемещения тела роботом необходимо разработать программу управления для ЭВМ. Такие программы пишутся на ассемблере или на языках, приспособленных для этих целей. В программе следует так же предусмотреть управление «кистью» робота, которая представляет собой механизм с минимум двумя степенями свободы. Отладка программы, «настройка» механизмов робота представляет очень важную для практических приложений область техники, которая не рассматривается в пособии из-за его ограниченного объема.